What is the Degree of Freedom of Robotic Arm?
Degree of Freedom is the independent motion number, it exists in three-dimensional coordinate when the components of robotic arm have movement.
Usually, we take movement of delivery mechanism as degree of freedom. Human has 27pcs degree of freedom from fingers to shoulders, but it is more difficult and unnecessary if to make robot arm with 27pcs dof.
To analysis from mechanics, object just has 6pcs dof in space. Therefore, in order to capture and transfer the objects which are on different positions in space, the delivery mechanism should also have 6pcs dof. Usually, the frequently-used robot arms are below 6pcs degree of freedom, most of special robot arm just have 2-4pcs DOF(degree of freedom), and universal robot arm has 3-6pcs DOF.
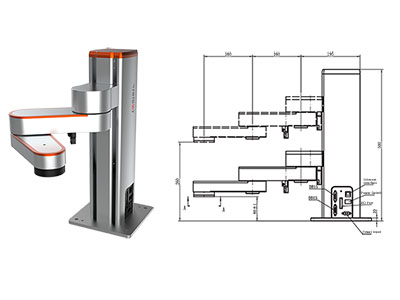
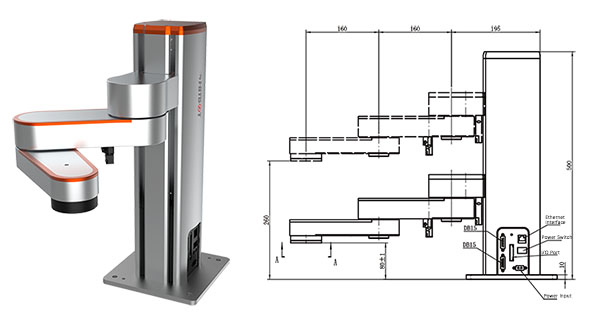
Each DOF of robot arm is realized by independent driving joint. Therefore, the movement flexibility of robot arm can be defined by joint and DOF. From actural structure, the joint is completed by axis to move. Therefore, we also name the joint as axis, usually the robot arm has 4/6 joints.
Different axes can complete different movements:
1. One pcs DOF
(1) One is linear movement, to consist of straight line.
(2) One is rotation movement, to consist of cured line.
2.Two pcs DOF
(1) 2pcs linear movement to consist of plane.
(2) 1pcs linear movement plus 1pcs rotation movement in the linear area, to consist of plane.
(3)1pcs linear movement plus 1pcs rotation movement not in the linear area, to consist of cured surface.
3.Three pcs DOF
(1) 3pcs linear movement to consists of cube.
(2)2pcs linear movement plus 1pcs rotation movement to consists of cylinder.
(3)1pcs linear movement plus 2pcs rotation movement to consist of sphere.
(4)3pcs rotation movement to consist of sphere.