
What is 6 degrees of freedom robotic arm?
A 6 degrees of freedom (DOF) robotic arm moves in six different directions: translation along the x, y, and z axes and rotation around these axes. This feature enables the arm to be highly versatile and perform a wide range of tasks.
Robotic arms are gaining popularity in manufacturing, healthcare, and research. They offer precision, speed, and accuracy, often outperforming human workers. The ability to move in six directions is a key feature that makes robotic arms adaptable to various tasks. It allows robotic arms to be highly versatile and perform a wide range of tasks.

The six degrees of freedom of a robotic arm are achieved through the use of various types of actuators, such as motors or hydraulics, that control the movement of the arm. The arm can rotate in any direction. However, the end effector, which is the tool or attachment at the end of the arm, can move in three-dimensional space.
One of the most common applications of 6 degrees of freedom robotic arms is in manufacturing. They offer precision, speed, and accuracy, often outperforming human workers. The ability to move in six directions is a key feature that makes robotic arms adaptable to various tasks.
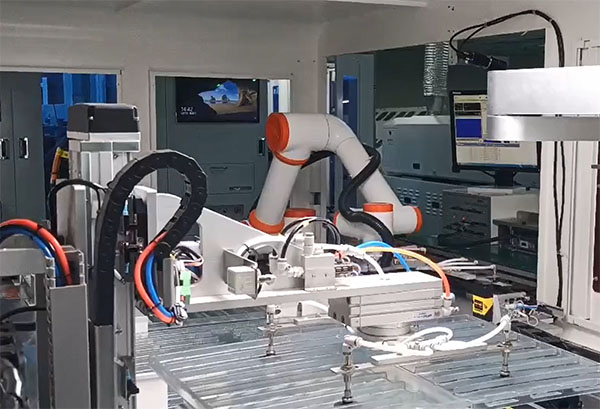
In manufacturing, 6-DOF robotic arms are good choice for tasks like picking, placing, welding, and painting. Their precision and repeatability make them ideal for consistent and accurate work. Their versatility allows them to perform various tasks, adapting to changing needs in production.
In healthcare, these robotic arms assist in minimally invasive surgeries, such as laparoscopic procedures. The precision of the arm reduces the risk of damaging tissue and organs, leading to faster recovery times for patients.

While 6 degrees of freedom robotic arms offer a wide range of benefits, there are some challenges associated with their use. One of the main challenges is the need for precise calibration to ensure accurate movements. In addition, the high level of complexity involved in controlling these arms can make programming and maintenance more difficult than with simpler robotic systems.
Despite their many benefits, these robotic arms face challenges, including the need for precise calibration and the complexity of programming and maintenance. These challenges can make controlling the arms more difficult than simpler robotic systems.
Despite these challenges, 6-DOF robotic arms remain attractive for various applications. Their flexibility, precision, and speed make them suitable for tasks requiring accuracy. As technology advances, we can expect more applications for these advanced robotic systems in the future.